|
|
Die Modelle zur ebenen Kinematik
am Institut für Diskrete Mathematik und Geometrie
|
|
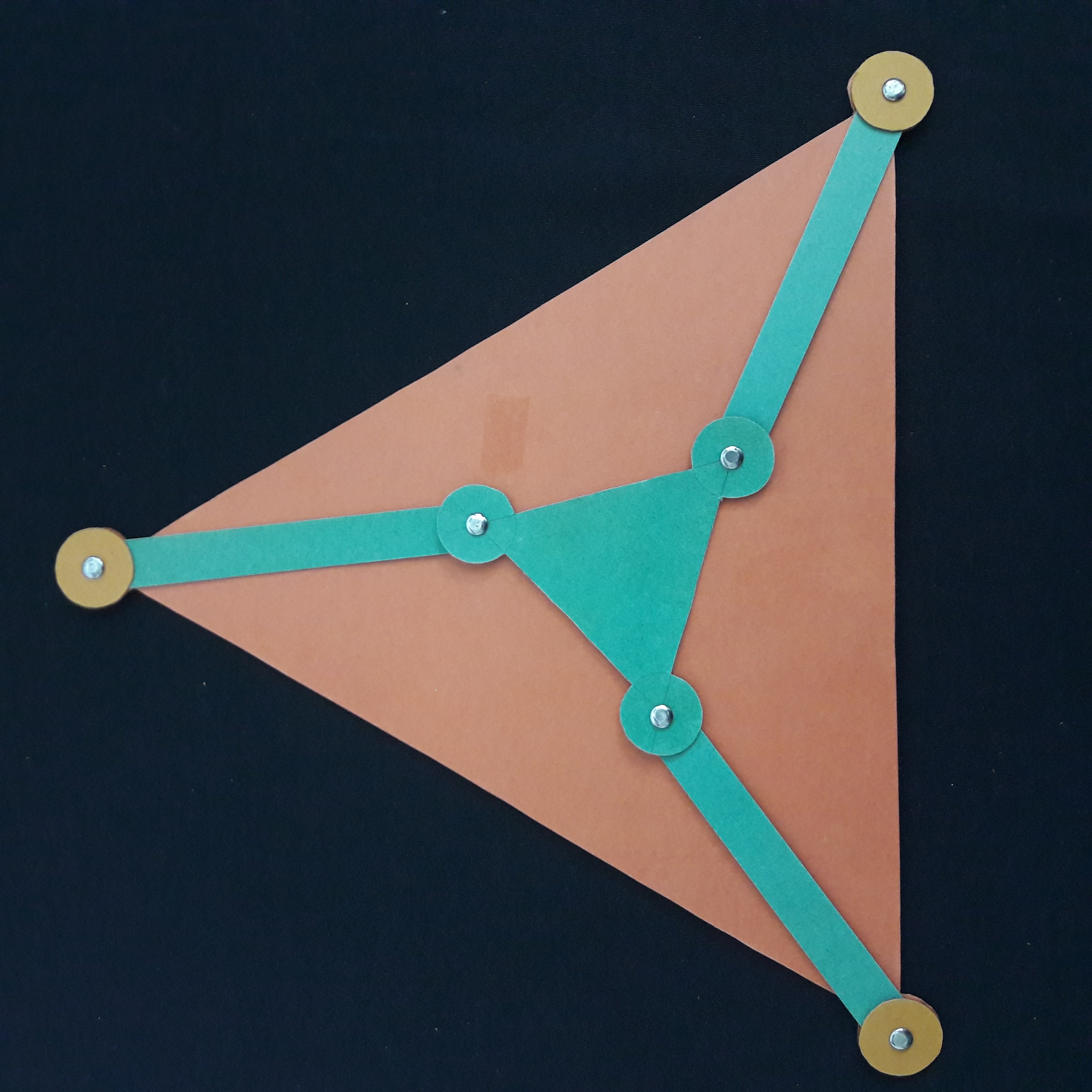
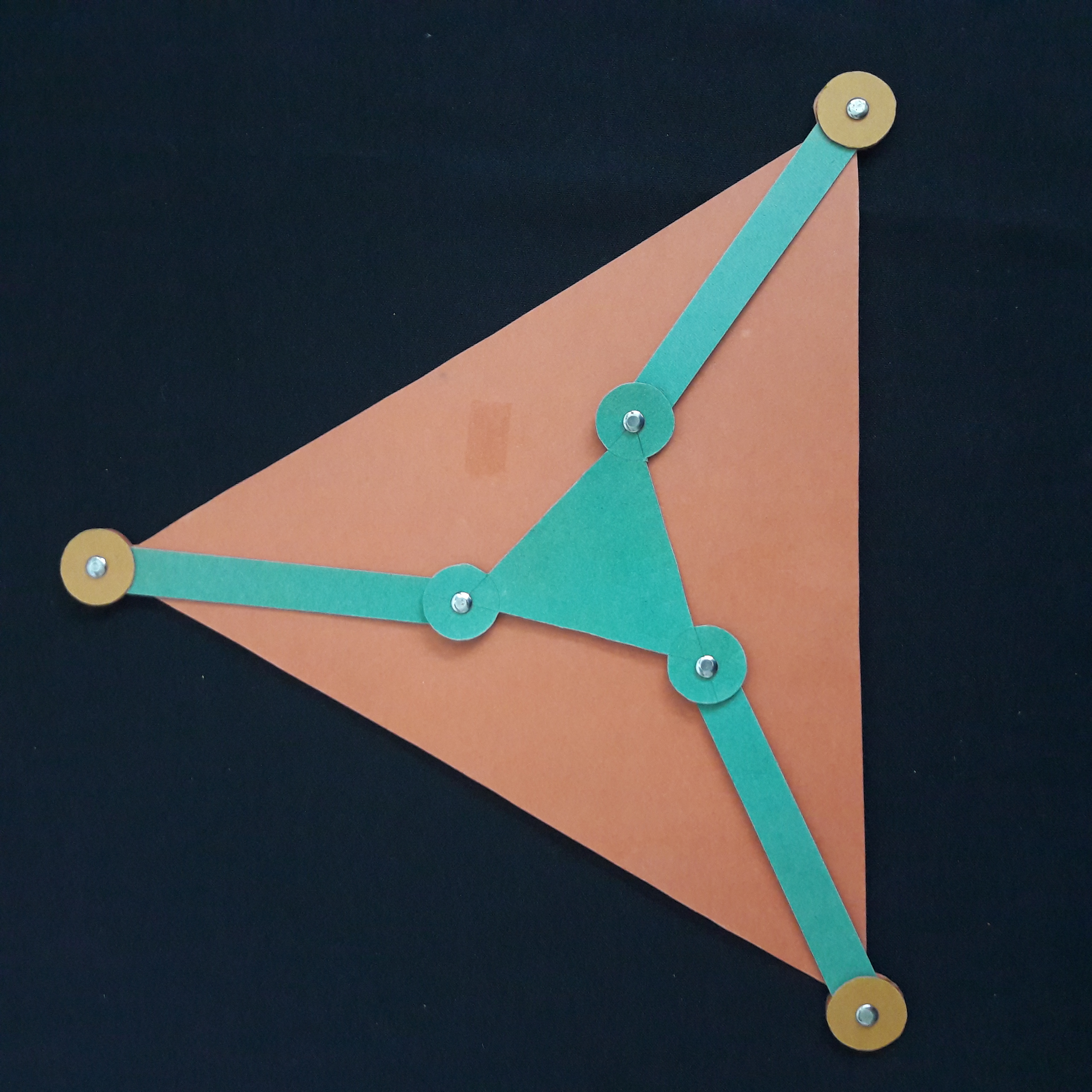
Ebener Parallelmechanismus (#92) |
|
| Englische Bezeichnung: |
| planar parallel mechanism |
| Kinematisches Verhalten: |
| kippend |
| Beschreibung: |
| Dieser kippende Mechanismus besteht aus zwei Dreiecken (Plattform und Basis) welche über 3 Stäbe mit Drehgelenken gekoppelt sind. |
| Verwendungszweck: |
| Demonstrationsmodell |
| Hersteller: |
| unbekannt |
| Material: |
| Karton |
| Maße (h x b): |
| cm x cm |
| Modellkatalognummer: |
| 815 |
| Inventarnummer: |
| nicht inventarisiert |
| Ähnliche Modelle: |
| 91, 93, 94 |
| Literatur: |
H. STACHEL: Infinitesimal flexibility of higher order for a planar parallel manipulator. In G. KARÁNÉ, H. SACHS and F. SCHIPP (eds), Topics in Algebra, Analysis and Geometry, BPR Kiadó (1999), S. 343-353
|
| |
|
| |
|
|
|
Navigation
Dokumentation
Kinematikmodellsammlung
Quick Links
Analyse ebener Getriebe
(in German)
Sammlung mathematischer Modelle
(in German)
Picture Gallery of Map Projections
H. Havlicek: Visualisation
Sitemap
|