|
Welcome to the research group
Differential Geometry and Geometric Structures
|
|

Members & friends of the group in Jul 2021
photograph © by Narges Lali
|
Differential geometry has been a thriving area of research
for more than 200 years, employing methods from analysis
to investigate geometric problems. Typical questions
involve the shape of smooth curves and surfaces and the
geometry of manifolds and Lie groups. The field is at
the core of theoretical physics and plays an important
role in applications to engineering and design.
Finite and infinite geometric structures are ubiquitous
in mathematics. Their investigation is often intimately
related to other areas, such as algebra, combinatorics or
computer science.
These two aspects of geometric research stimulate and
inform each other, for example, in the area of "discrete
differential geometry", which is particularly well suited
for computer aided shape design.
|
|
Gallery of some research interests and projects

Symmetry breaking in geometry:
We discuss a geometric mechanism that may,
in analogy to similar notions in physics,
be considered as "symmetry breaking" in geometry.
(Fuchs, Hertrich-Jeromin, Pember;
Fig ©Nimmervoll)
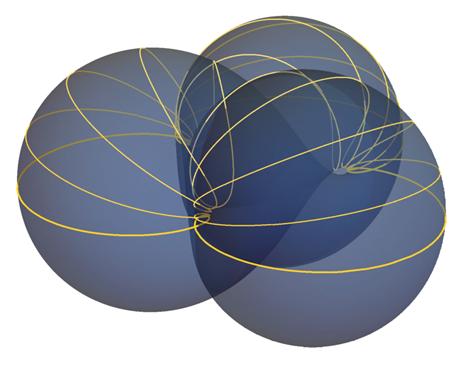
Cyclic coordinate systems:
an integrable discretization in terms of a discrete flat
connection is discussed.
Examples include systems with discrete flat fronts or
with Dupin cyclides as coordinate surfaces
(Hertrich-Jeromin, Szewieczek)
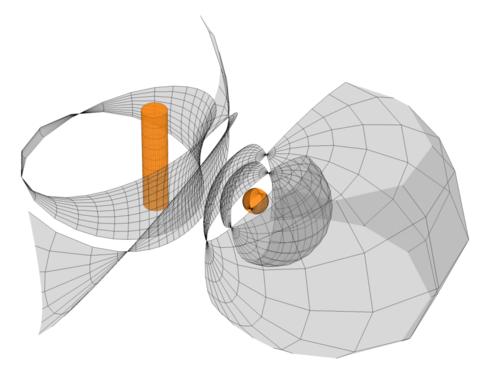
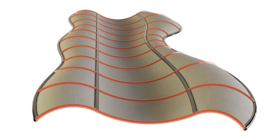
We study surfaces with a family of
spherical curvature lines
by evolving an initial spherical curve through
Lie sphere transformations,
e.g., the Wente torus
(Cho, Pember, Szewieczek)
Discrete Weierstrass-type representations
are known for a wide variety of discrete surfaces classes.
In this project, we describe them in a unified manner,
in terms of the Omega-dual transformation applied to
to a prescribed Gauss map.
(Pember, Polly, Yasumoto)
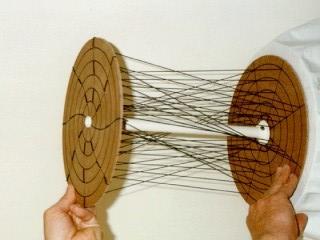
Billiards:
The research addresses invariants of trajectories of a
mass point in an ellipse with ideal physical reflections
in the boundary. Henrici's flexible hyperboloid paves the
way to transitions between isometric billiards in ellipses
and ellipsoids (Stachel).
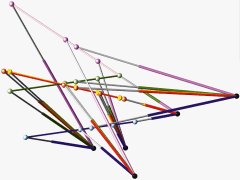
Spreads and Parallelisms:
The topic of our research are connections among spreads
and parallelisms of projective spaces with areas like
the geometry of field extensions, topological geometry,
kinematic spaces, translation planes or flocks of quadrics.
(Havlicek)

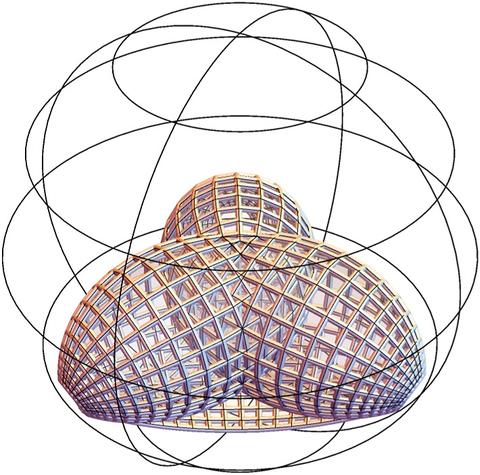
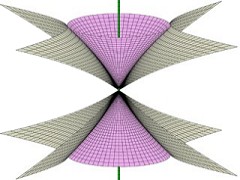
This is a surface of (hyperbolic) rotation in hyperbolic
space that has constant Gauss curvature,
a
recent classification project.
(Hertrich-Jeromin, Pember, Polly)
Geometric shape generation:
We aim to understand geometric methods to generate
and design (geometric) shapes,
e.g., shape generation by means of representation formulae,
by transformations, kinematic generation methods, etc.
(Hertrich-Jeromin, Fig Lara Miro)
Affine Differential Geometry:
In affine differential geometry a main point of research is
the investigation of special surfaces in three dimensional
affine space.
(Manhart)
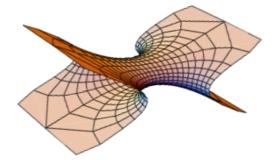
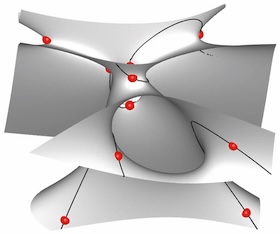
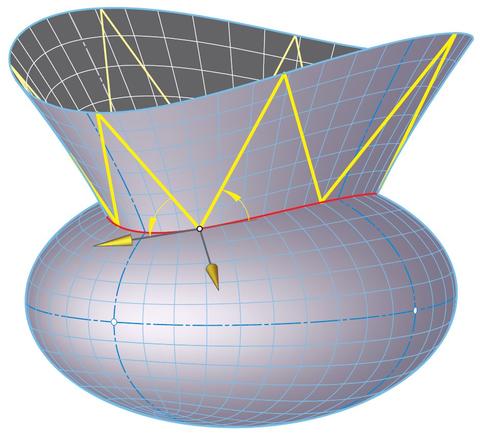
Transformations & Singularities:
We aim to understand how transformations of particular
surfaces behave (or fail to behave) at singularities, and
to study how those transformations create (or annihilate)
singularities.
The figure shows the isothermic dual of an ellipsoid,
which is an affine image of a minimal
Scherk tower.
(Hertrich-Jeromin)
|
|
News
- 17 Jul 2025, 13:00 CEST: JA, surfaces and beyond
- Riku Kishida (Inst of Science Tokyo):
The volume of marginally trapped submanifolds and
flat surfaces in $3$-dimensional light-cone
Abstract
A space-like submanifold of codimension $2$ in a Lorentzian manifold
is said to be marginally trapped if its mean curvature vector field
is light-like.
In this talk, I explain that a marginally trapped submanifold has a
locally volume-maximizing property under specific conditions.
As a typical example of marginally trapped surface in the
$4$-dimensional Minkowski spacetime, I also discuss flat surfaces in
the $3$-dimensional light-cone.
- 26 Jun 2025, 13:00 CEST: JA, surfaces and beyond
- Philipp Käse (Kobe University, TU Darmstadt):
A new family of CMC surfaces in homogeneous spaces
Abstract
In 1841 Delaunay characterized surfaces of constant mean curvature
$H=1$ in Euclidean $3$-space invariant under rotation.
This result was generalized by several authors to screw-motion
invariant CMC surfaces in $E(k,t)$, but it turns out that the
classification is not complete.
In fact, new (embedded) CMC surfaces arise in addition to
the Delaunay family.
In this talk I would like to talk about these new surfaces and
present a complete classification of screw motion CMC surfaces in
$E(k,t)$.
- 12 Jun 2025, 13:00 CEST: JA, surfaces and beyond
- Yuta Ogata (Kyoto Sangyo Univ):
Darboux transformations for curves
Abstract
We introduce the Darboux transformations for smooth and discrete
curves. This is related to the linearization of Riccati type equations and
we study their monodromy problem. We will show some examples of periodic
(closed) Darboux transformations for curves.
This is based on the joint work with Joseph Cho and Katrin Leschke.
- 14 May 2025: Geometry seminar
- Niklas Affolter (TU Wien): Discrete Koenigs nets and inscribed quadrics
Abstract
In this talk we consider discrete Koenigs nets with parameter
lines contained in d-dimensional spaces. For these Koenigs nets
we show that there is a unique quadric, such that the parameter
spaces are tangent to the quadric. This allows us to establish a
bijection between discrete Koenigs nets and discrete
autoconjugate curves contained in the quadric. I will also
explain some of the technique we used to derive these results,
including lifts to "maximal" dimensions and the relation to
touching inscribed conics. Joint work with Alexander Fairley (TU
Berlin).
- 07 May 2025: Geometry seminar
- Jan Techter (TU Berlin): Discrete parametrized surfaces via binets
Abstract
In several classical examples discrete surfaces naturally arise
as pairs consisting of combinatorially dual nets describing the
"same" surface. These examples include Koebe polyhedra, discrete
minimal surfaces, discrete CMC surfaces, discrete confocal
quadrics, and pairs of circular and conical nets. Motivated by
this observation we introduce a discretization of parametrized
surfaces via binets, which are maps from the vertices and faces
of the square lattice into space.
We look at discretizations of various types of parametrizations
using binets. This includes conjugate binets, orthogonal binets,
Gauss-orthogonal binets, principal binets, Königs binets, and
isothermic binets. Those discretizations are subject to the
transformation group principle, which means that the different
types of binets satisfy the corresponding projective, Möbius,
Laguerre, or Lie invariance respectively, in analogy to the
smooth theory. We discuss how the different types of binets
generalize well established notions of classical
discretizations.
This is based on joint work with Niklas Affolter and Felix
Dellinger.
- 30 Apr 2025: Geometry seminar
- Emil Pobinger (TU Wien): The 27 lines on a cubic surface
Abstract
The fact that cubic surfaces (in the appropriate space) contain
exactly 27 lines is one of the first major results one
encounters when studying algebraic geometry. There are many ways
to prove this statement; in this seminar paper, we will work
through a proof on an intermediate level - originally due to
Reid - and fill out its details. Additionally, we also provide
visual examples not originally provided by Reid.
- 02 Apr 2025: Geometry seminar
- Marcin Lis (TU Wien):
Zeros of planar Ising models via flat SU(2) connections
Abstract
Livine and Bonzom recently proposed a geometric formula for a
certain set of complex
zeros of the partition function of the Ising model defined on
planar graphs. Remarkably, the zeros
depend locally on the geometry of an immersion of the graph in
the three dimensional Euclidean
space (different immersions give rise to different zeros). When
restricted to the flat case, the weights
become the critical weights on circle patterns. I will
rigorously prove the formula by geometrically
constructing a null eigenvector of the Kac-Ward matrix whose
determinant is the squared partition function.
The main ingredient of the proof is the realisation that the
associated Kac-Ward transition matrix
gives rise to an SU(2) connection on the graph, creating a
direct link with rotations in three dimensions.
The existence of a null eigenvector turns out to be equivalent
to this connection being flat.
- 27 Mar 2025, 12:00 CEST: JA, surfaces and beyond
- Udo Hertrich-Jeromin (TU Wien):
Doubly cGc profiles
Abstract
I plan to talk about a joint project on profile curves that generate
two surfaces of revolution of constant Gauss curvature in different
space forms.
This is joint work with S Bentrifa, M Kokubu and D Polly.
|